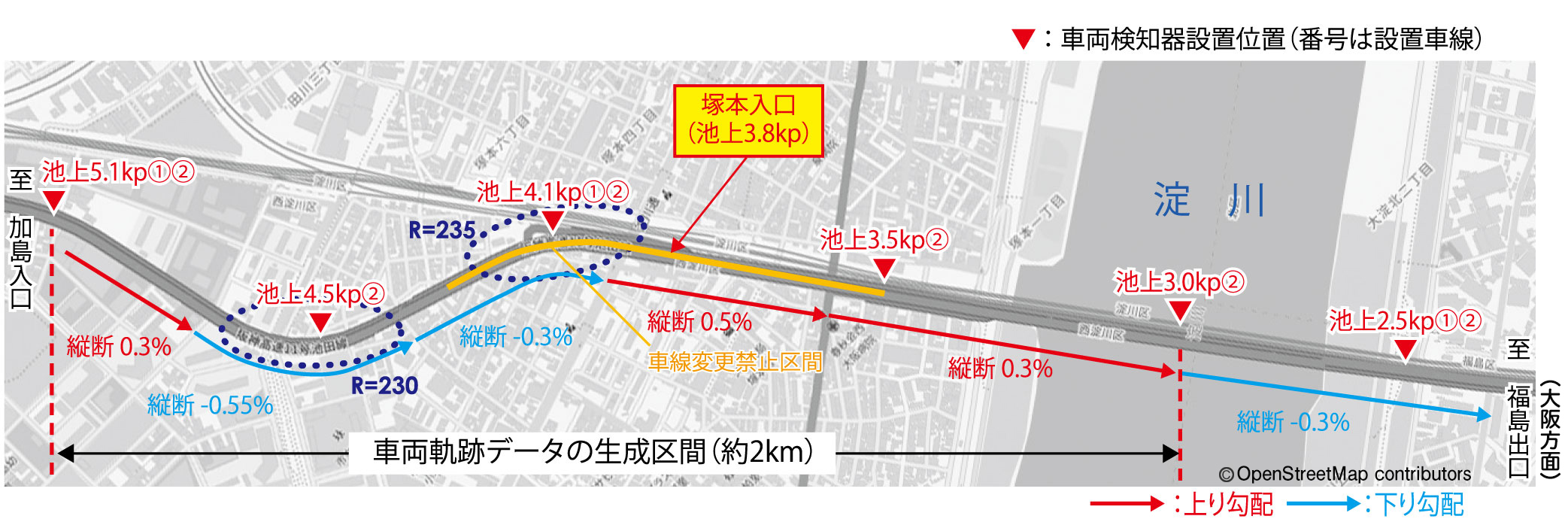
画像センシングにより対象区間を走行する全車両の走行軌跡データを生成
数キロ範囲の対象区間を走行する全車両について、0.1秒単位の運転挙動を車両軌跡データとして、長時間にわたりデータ化
車両軌跡データの有する位置情報をもとに仮想環境への出力が可能
車両軌跡の位置情報をもとに仮想環境へ出力することで、現実の交通状況を様々な視点から再現することが可能です。また、速度等をパラメータに渋滞発生プロセスの可視化も可能です。

多様な交通事象を含む車両軌跡データを関連情報とともにデータベース化
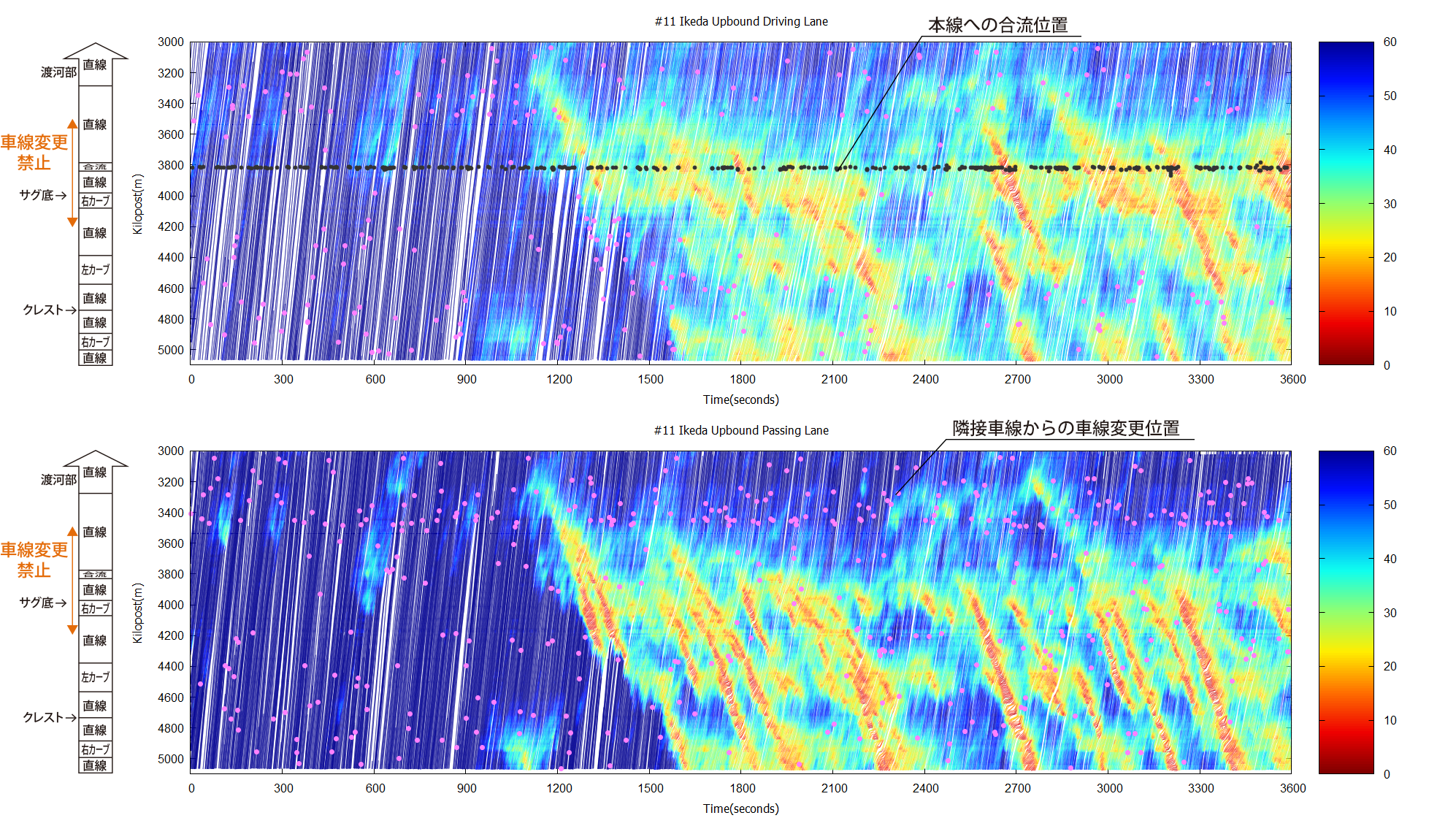
現実の交通状況下で発生している様々な交通事象がデータ化された車両軌跡データを、画像センシングにより計測した車長情報や、走行位置の路面線形情報とともにデータベース化しました。(“ データベース構成”参照)